hile most utility locators simply want to know where a pipe is located, there are times when more detailed information is required. One example is knowing the diameter of a buried pipe.
To estimate pipe diameter, three important conditions must exist:
1. The pipe must be non-metallic – since the GPR wave will not penetrate metal, it will never see the reflection from the bottom of the bottom
of the pipe.
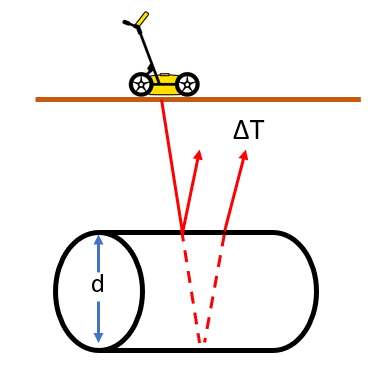
2. You must get a reflection from the top and bottom of pipe (Figure 1) – even if a pipe is non-metallic, it doesn’t necessarily mean you will get a reflection from the bottom. Reasons for this include the pipe diameter being too small (so the travel time within the pipe is too fast) or the reflection being too weak to be detected by the GPR
- To confirm that the 2 hyperbolas are from the top and bottom of the same pipe, look for two things:
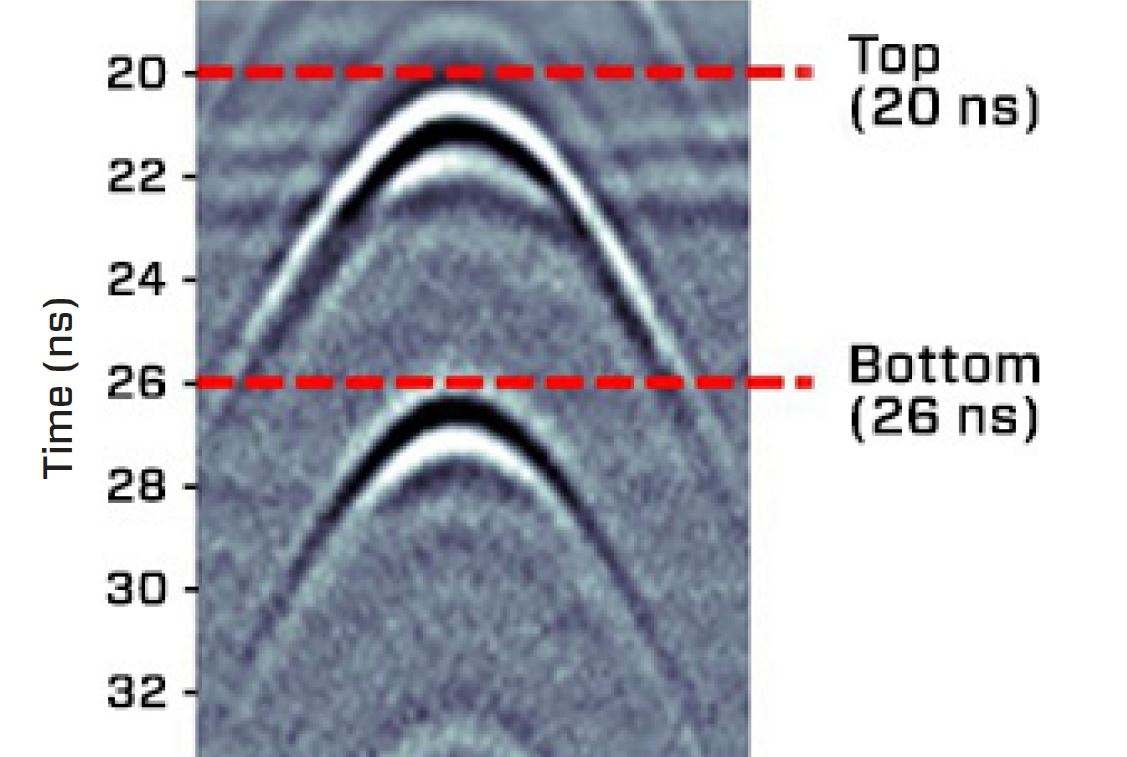
- the two hyperbolas (from top and bottom) should be exactly located one on top of the other (Figure 2).
- the bottom hyperbola has the opposite polarity of the top hyperbola. In Figure 2, the hyperbola reflection from the top of pipe is caused by the GPR wave travelling from soil to water, resulting in bands that are black-white-black. The reflection from the bottom of pipe is caused by the GPR wave going from water to soil, so the bands are the opposite polarity: white-black-white. This has to do with the reflection coefficient, moving from a lower to higher dielectric constant in the first case, and then, vice-versa.
3. The contents of the pipe are known – most typically, it would be empty (air or gas) or water-filled.
Once you satisfy all the criteria above, we can calculate the estimated diameter. Let’s start with our familiar depth-time equation:

Figure 2 shows a zoomed image of a water pipe, where the top and bottom of pipe are clearly seen.