


any GPR users dislike setting up survey grids; the complaint is that it takes time and is not easy. Sensors & Software has recommended grid collection for two decades because, simply put, it generates data with reliable area coverage and results in better subsurface imaging, hence making interpretation easier. The most spectacular GPR data is almost always displayed as a depth slice or a 3D voxel cube. But, for many people there is a reluctance to take the time and effort required to set up and collect data in a grid.
The reason that grids are useful is because they ensure full area sampling, provide data with an accurate position and known sensor orientation for every GPR trace collected, allowing systematic data processing that is spatially dependent. Using a grid “forces” the operator to collect data in an organized manner resulting in better depth slices and 3D cubes.Is there another, perhaps easier, way to collect data over an area and ensure the position of every GPR trace is known?
The answer is “Yes”. There are many positioning technologies available including laser theodolites, IMUs (Inertial Measurement Units) but the most well-known is probably GPS. GPSs are widely available and are easily added to Sensors & Software GPR systems but, to use GPS for surveying an area with GPR, the GPS must have better accuracy than the GPS in your car or your Smartphone; and that, of course, means a more costly GPS unit.
Is there another, perhaps easier, way to collect data over an area and ensure the position of every GPR trace is known? The answer is “Yes”.
The most accurate GPS is RTK GPS which stands for “Real Time Kinematic”. These systems use two GPS receivers: one roving with the GPR system and a second on a fixed base station which communicates with the roving receiver to provide a much higher level of positional accuracy than can be achieved with the roving receiver alone; to less than 0.5 meters in most cases.
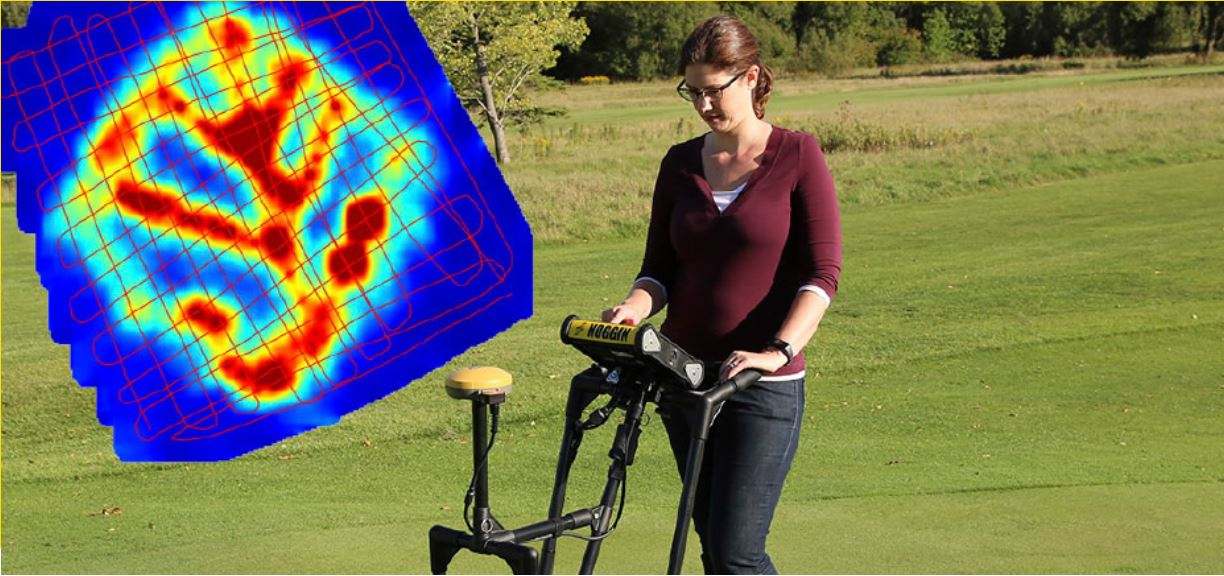
RTK GPS is not always necessary. Many moderately- priced differential GPSs which have built-in smoothing algorithms and satellite-based position correction (such as WAAS) that reduce drift and access both GPS (USA) and GLONASS (Russia) satellites. These GPS units can provide the positional accuracy necessary to generate depth slices using GPS. In fact, the data shown in Figure 3 was collected with such a GPS (Topcon SGR-1).
When GPR data is collected with high accuracy positioning, setting up a grid can be avoided. Data is collected over an area in the same way you cut your lawn with a lawnmower; just walk around in some sort of smooth pattern to make sure the whole area has been covered. While the positioning is handled by a system such as GPS, the user must still be diligent to ensure that adequate area coverage is attained.
 with depth slice (c). Spiral path (b) with depth slice (d)")
The EKKO_Project software offers a new feature in the SliceView module: the ability to process line data collected with controlled position into depth slices.
For example, two single “line” data sets were collected over a golf green using two different paths. Line 1 entailed walking back and forth in both the X and Y directions (Figure 1a) and Line 2 followed a spiral path starting in the center and spiralling outward (Figure 1b).
Like SliceView for grid data, SliceView for lines with controlled xy positions has several processes that run automatically before the interpolation and depth slicing step, specifically, Dewow, Background Subtraction Filter, Migration, Envelope and Gain (Figure 2). Advanced users can select the processes to apply to the data. Most of the input parameters for these processes are defaulted but one parameter important for generating the best, most focused depth slices is the GPR velocity at the survey site.
If possible, measure the GPR velocity by finding a hyperbolic reflector in the data and using the hyperbola-fitting function and enter this velocity into the velocity field for the Migration process. If not possible, use the default velocity of 0.10 m/ns.
Another parameter important for the depth slice processing is the interpolation distance. Generally, this is set to a value equal to the average distance between adjacent passes across the survey area.
Just like GPR gridded data collection, the tighter the distance between adjacent passes, the better the final images. The average distance between passes in Figure 1 is about 1 meter. The depth slices generated from the data paths in Figure 1 are displayed in Figure 1c and 1d. These show the dendritic pattern of the draining pipes under the golf green.

Depth slicing line data collected with GPS will be popular with those who dislike creating grids. As the cost of accurate positional technologies such as RTK GPS and laser theodolites come down in price, more extensive use of gridless data collection will occur. Simplifying GPR data collection for our customers means they get the most from the time they spent in the field and ultimately provide more economic solutions to subsurface challenges. We anticipate seeing many more surveys like the one shown in Figure 3,4,5.



Golf green GPR data courtesy of Barry Allred, USDA.




